Với giảiHoạt động 1 trang 44 Chuyên đề Tin học 10 Kết nối tri thức chi tiết trong Bài 10: Điều khiển robot nhận biết vật cản dễ dàng xem và so sánh lời giải từ đó biết cách làm bài tập Chuyên đề Tin 10. Mời các bạn đón xem:
Giải bài tập Chuyên đề Tin học 10 Bài 10: Điều khiển robot nhận biết vật cản
Hoạt động 1 trang 44 chuyên đề học tập Tin học 10: Tìm hiểu cách điều khiển cảm biến siêu âm
Đọc, thảo luận về nguyên tắc hoạt động và lệnh lập trình cảm biến siêu âm.
Trả lời:
Nguyên tắc hoạt động của cảm biến siêu âm:
Mỗi cảm biến siêu âm chỉ có tác dụng trong một khoảng cách nhất định. Gọi khoảng cách này là Max. Khi vật cản ở xa, vượt qua giới hạn Max, có thể coi hàm nhận tín hiệu cảm biến sẽ trả về giá trị Max. Cảm biến siêu âm dựa trên nguyên lý phát sóng và phản xạ sóng siêu âm.
Lệnh lập trình cảm biến siêu âm:
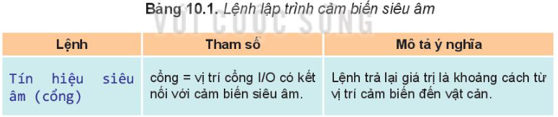
Câu lệnh lập trình cảm biến siêu âm luôn trả về giá trị là khoảng cách từ cảm biến siêu âm đến vật cản phía trước theo đơn vị centimet.
Để robot nhận được tín hiệu cảm biến siêu âm liên tục với thời gian thực chúng ta cần đưa lệnh điều khiển cảm biến siêu âm vào trong nhóm lệnh thứ hai, tức là nhóm lệnh lặp vô hạn trong chương trình.
Sơ đồ chung của việc xử lí thông tin cảm biến siêu âm của robot:
forever
if <nhận tín hiệu cảm biến siêu âm>
Xử lí tín hiệu cảm biến siêu âm
Xem thêm lời giải bài tập Chuyên đề Tin học 10 Kết nối tri thức hay, chi tiết khác:
Hoạt động 2 trang 45 chuyên đề học tập Tin học 10: Robot tránh vật cản như thế nào?...
Xem thêm các bài giải bài tập Chuyên đề Tin học 10 Kết nối tri thức hay, chi tiết khác:
Bài 9: Điều khiển robot chuyển động
Bài 10: Điều khiển robot nhận biết vật cản
Bài 11: Dẫn đường tự động cho robot
Bài 12: Thực hành điều khiển robot trên sa bàn
Bài 13: Lập trình điều khiển một số phụ kiện
CÔNG TY TNHH ĐẦU TƯ VÀ DỊCH VỤ GIÁO DỤC VIETJACK
- Người đại diện: Nguyễn Thanh Tuyền
- Số giấy chứng nhận đăng ký kinh doanh: 0108307822, ngày cấp: 04/06/2018, nơi cấp: Sở Kế hoạch và Đầu tư thành phố Hà Nội.
© 2021 Vietjack. All Rights Reserved.
![]()
")
")
: Bộ xử lí thông tin ở quanh ta")
")