Với giải Hoạt động 3 trang 52 Chuyên đề Tin học 10 Kết nối tri thức chi tiết trong Bài 11: Dẫn đường tự động cho robot dễ dàng xem và so sánh lời giải từ đó biết cách làm bài tập Chuyên đề Tin 10. Mời các bạn đón xem:
Giải bài tập Chuyên đề Tin học 10 Bài 11: Dẫn đường tự động cho robot
Hoạt động 3 trang 52 chuyên đề học tập Tin học 10: Dẫn đường với cảm biến dò đường 4 mắt.
Đọc, thảo luận nhóm về câu lệnh lập trình cảm biến đò đường bốn mắt và cách thức dẫn đường cho robot với cảm biến bốn mắt.
Trả lời:
* Câu lệnh lập trình cảm biến đò đường bốn mắt:
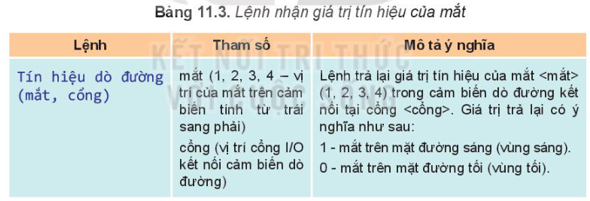
- Cảm biến dò đường bốn mắt sẽ có tín hiệu được đánh số thứ tự 1,2,3,4 từ trái sang phải theo hướng nhìn của robot.
- Cảm biến dò đường bốn mắt giúp phát hiện được đường di chuyển có ngã ba hoặc ngã tư, do vậy robot có thể dò chính xác hơn.
- Lệnh nhận giá trị tín hiệu của mắt trong cảm biến dò đường bốn mắt cũng tương tự như cảm biến dò đường hai mắt.
* Cách thức dẫn đường cho robot với cảm biến bốn mắt:
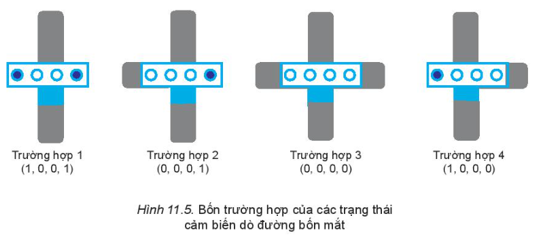
Mỗi mắt của cảm biến dò đường bốn mắt có hai giá trị tín hiệu bằng 0 và bằng 1. Do đó tổng cộng chúng ta có 24 = 16 trường hợp các tổ hợp giá trị tín hiệu từ 4 mắt. Mỗi tổ hợp có dạng (a1, a2, a3, a3, a4) với ak bằng 0 hoặc 1 là giá trị tín hiệu của mắt thứ k trong cảm biến. Hình 11.5 mô tả bốn trường hợp điển hình của trạng thái cảm biến dò đường 4 mắt trên thực địa khi gặp ngã ba, ngã tư.
Ví dụ: (1,0,0,1) tương ứng với trạng thái mắt 2, 3 nằm ở vùng tối, mắt 1 và 4 ở vùng sáng - robot chuyển động theo đường thẳng.
Xem thêm lời giải bài tập Chuyên đề Tin học 10 Kết nối tri thức hay, chi tiết khác:
Xem thêm các bài giải bài tập Chuyên đề Tin học 10 Kết nối tri thức hay, chi tiết khác:
Bài 10: Điều khiển robot nhận biết vật cản
Bài 11: Dẫn đường tự động cho robot
Bài 12: Thực hành điều khiển robot trên sa bàn
Bài 13: Lập trình điều khiển một số phụ kiện
Bài 14: Thực hành: Dự án điều khiển robot trên sa bàn
CÔNG TY TNHH ĐẦU TƯ VÀ DỊCH VỤ GIÁO DỤC VIETJACK
- Người đại diện: Nguyễn Thanh Tuyền
- Số giấy chứng nhận đăng ký kinh doanh: 0108307822, ngày cấp: 04/06/2018, nơi cấp: Sở Kế hoạch và Đầu tư thành phố Hà Nội.
© 2021 Vietjack. All Rights Reserved.
![]()
")
")
: Bộ xử lí thông tin ở quanh ta")
")