Tailieumoi.vn giới thiệu giải bài tập Chuyên đề Tin học 10 Bài 2: Bảng mạch điều khiển và cơ cấu chấp hành sách Kết nối tri thức hay, chi tiết giúp học sinh xem và so sánh lời giải từ đó biết cách làm bài tập Chuyên đề học tập Tin học 10. Mời các bạn đón xem:
Giải bài tập Chuyên đề Tin học 10 Bài 2: Bảng mạch điều khiển và cơ cấu chấp hành
Khởi động

Trả lời:
Vai trò của bảng mạch điện tử của robot: Thực hiện chức năng quan trọng nhất trong robot là xử lý tín hiệu ghi nhận được và đưa ra quyết định điều khiển robot. Vì thế bảng mạch điều khiển còn được coi là bộ não của robot.
1. Bảng mạch điều khiển
Thảo luận nhóm về cơ chế hoạt động của robot. Bộ phận nào là quan trọng nhất chi phối mọi hoạt động của robot?
Trả lời:
Bảng mạch điều khiển của robot thực hiện chức năng quan trọng nhất trong robot là xử lý tín hiệu ghi nhận được và đưa ra quyết định điều khiển robot. Vì thế bảng mạch điều khiển còn được coi là bộ não của robot.
Trả lời:
Bộ nhớ có thể có 3 dạng như sau:
- Bộ nhớ tạm (RAM) dùng cho việc tính toán dữ liệu.
- Bộ nhớ cố định (ROM) lưu trữ các chương trình (bao gồm PROM, EPROM, EEPROM)
- Bộ nhớ lưu dữ liệu (văn bản, hình ảnh, âm thanh, video, tệp tin, cấu hình) thường là một thẻ nhớ được gắn vào bảng mạch điều khiển qua một khe cắm mở rộng.
Trả lời:
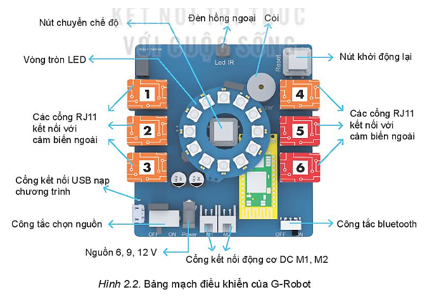
Bảng mạch điều khiển trong các robot nói chung đều được thiết kế dựa trên các nền tảng thiết kế mở. Nhờ vậy, có thể dễ dàng kết nối với các cảm biến hay các cơ cấu chấp hành và phụ kiện tiếp nhận điều khiển một cách dễ dàng, phù hợp với việc sử dụng trong môi trường giáo dục. Một trong các bảng mạch thuộc loại nêu trên đó là bảng mạch của robot G-Robot (Hình 2.2)
2. Động cơ – cơ cấu chấp hành chính trong robot
Trả lời:
Có hai loại động cơ thường dùng cho robot là động cơ DC và động cơ Servo. Sự khác nhau của chúng:
- Động cơ DC: là loại động cơ điện 1 chiều dùng để thực hiện các chuyển động với vận tốc không đổi trong những khoảng thời gian xác định, ví dụ quay các bánh xe để robot di chuyển từ vị trí này sang vị trí khác.
- Động cơ Servo: là động cơ có khả năng phản hồi vị trí cuối cùng của trục quay. Đầu vào cho điều khiển của nó là tín hiệu (tương tự hoặc số) đại diện cho vị trí cuối cùng và hướng quan của trục quay. Trong robot động cơ servo thường dùng để điều khiển các cử động nâng, hạ đến vị trí thích hợp, ví dụ điều khiển cánh tay để di chuyển các đồ vật.
Trả lời:
Vì robot cần 2 bánh xe tương ứng với 2 động cơ DC.
Trả lời:
Vì 2 cổng kết nối động cơ servo cho phép chúng ta lắp ghép được một cánh tay robot đơn giản.
Trả lời:
Vì bảng mạch điều khiển đóng vai trò tiếp nhận các dữ liệu, xử lý và điều khiển các cơ cấu chấp hành dựa trên kết quả xử lý.
Trả lời:
Lắp sai, robot sẽ chuyển động ngược lại với các lệnh điều khiển do vị trí động cơ bị lắp ngược. Ví dụ: robot sẽ đi lùi nếu nhận được lệnh đi thẳng…
Trả lời:
Có ảnh hưởng. Công xuất của động cơ DC sẽ giảm khi nguồn điện của pin giảm xuống thấp. Vì công xuất là thông số cho biết lượng điện năng tiêu thụ trong một đơn vị thời gian, do đó nguồn điện của pin giảm thì lượng điện năng mà pin cung cấp trong một đơn vị thời gian, thì lượng điện năng mà pin cung cấp trong một đơn vị thời gian cũng sẽ giảm tưởng ứng.
Trả lời:
* Một số thông tin chính liên quan liên quan đến bảng mạch điều khiển của Adruino:
Hiện nay, Arduino được sử dụng rất rộng rãi, không chỉ Việt Nam mà trên toàn thế giới. Điều đó cho thấy, Arduino có những ưu điểm độc đáo của mình. Đặc điểm nổi bật nhất của
Arduino là môi trường phát triển ứng dụng cực kỳ dễ sử dụng. Cách sử dụng board mạch Arduino cũng như Arduino IDE là rất dễ dàng ngay cả với người ít am hiểu về điện tử và lập trình.
Arduino có các tập lệnh hết sức đơn giản. Nhờ đó, Arduino che đi sự phức tạp của việc lập trình cho vi điều khiển. Ví dụ, chỉ với vài câu lệnh đơn giản là có thể chớp, tắt được được
một con LED mà không cần hiểu kiến trúc của vi điều khiển.
Công cụ phát triển Arduino có thể chạy trên cả hệ điều hành Windows, Mac OS, Linux.
Bảng mạch điều khiển của Adruino dùng ngôn ngữ lập trình Adruino.
* Một số thông tin chính liên quan liên quan đến bảng mạch điều khiển Microbit:
Mạch điều khiển động cơ cho Microbit cho phép điều khiển hai động cơ với điều khiển tiến, lùi và dừng, đồng thời cho phép truy cập vào các chân khác. Nó có các khối đầu cuối để kết
nối bốn thiết bị đầu vào và nguồn cung cấp 3V được điều chỉnh được đưa vào đầu nối 80 cách để cấp nguồn cho micro: bit BBC được lắp vào.
Bảng mạch điều khiển Microbit dùng ngôn ngữ lập trình Microbit.
Xem thêm các bài giải bài tập Chuyên đề Tin học 10 Kết nối tri thức hay, chi tiết khác:
Bài 1: Cấu tạo chung của robot giáo dục
Bài 3: Cảm biến và phụ kiện dùng trong robot
Bài 4: Thực hành lắp robot hoàn chỉnh
Bài 5: Phần mềm lập trình điều khiển robot
CÔNG TY TNHH ĐẦU TƯ VÀ DỊCH VỤ GIÁO DỤC VIETJACK
- Người đại diện: Nguyễn Thanh Tuyền
- Số giấy chứng nhận đăng ký kinh doanh: 0108307822, ngày cấp: 04/06/2018, nơi cấp: Sở Kế hoạch và Đầu tư thành phố Hà Nội.
© 2021 Vietjack. All Rights Reserved.
![]()
")
")
: Bộ xử lí thông tin ở quanh ta")
")