Tailieumoi.vn giới thiệu giải bài tập Chuyên đề Tin học 10 Bài 4: Thực hành lắp robot hoàn chỉnh sách Kết nối tri thức hay, chi tiết giúp học sinh xem và so sánh lời giải từ đó biết cách làm bài tập Chuyên đề học tập Tin học 10. Mời các bạn đón xem:
Giải bài tập Chuyên đề Tin học 10 Bài 4: Thực hành lắp robot hoàn chỉnh
Nhiệm vụ 1. Lắp ráp mô hình xe cơ bản
Yêu cầu: Hoàn thành lắp ráp mô hình robot dạng xe cơ bản (gọi tắt là mô hình xe cơ bản). Các bộ phận lắp ráp đúng quy định.
Hướng dẫn:
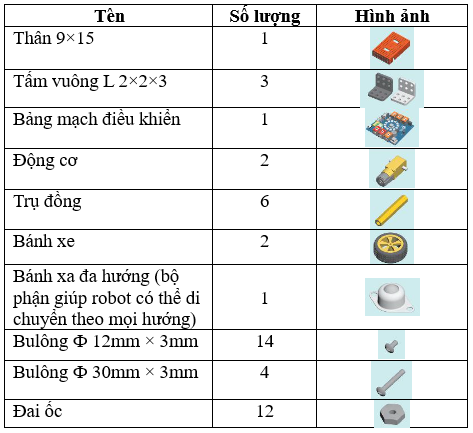
Bước 1. Chuẩn bị danh sách các bộ phận và phụ kiện cần thiết để lắp ráp mô hình xe cơ bản theo Bảng 4.1
Bảng 4.1. Danh sách bộ phận và phụ kiện
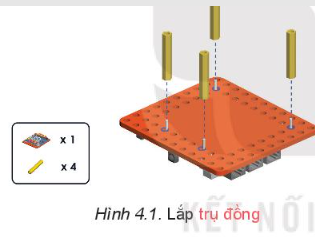
Bước 2. Lắp 4 trụ đồng vào 4 chân ốc dưới bảng mạch điều khiển (Hình 4.1)
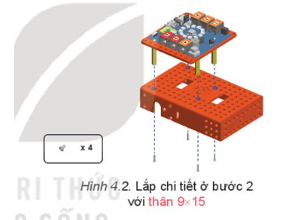
Bước 3. Lắp chi tiết ở bước 2 với thân 9×15 của robot (Hình 4.2)
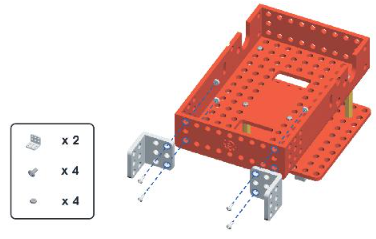
Bước 4. Lắp 2 tấm vuông L 2×2×3 vào trước thân 9×15 (Hình 4.3)
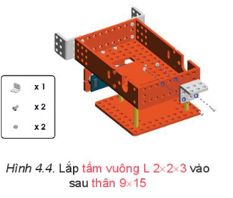
Bước 5. Lắp tấm vuông L 2×2×3 vào sau thân 9×15 (Hình 4.4)
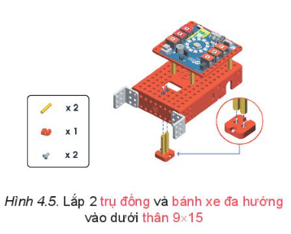
Bước 6. Lắp 2 trụ đồng và bánh xe đa hướng vào dưới thân 9×15 (Hình 4.5)
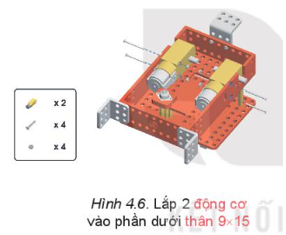
Bước 7. Lắp 2 động cơ vào phần dưới thân 9×15 của xe cơ bản. Lưu ý: dây kết nối của động cơ phải quay vào phía trong của thân 9×15 (Hình 4.6)
Bước 8. Lắp 2 bánh xe vào trục của động cơ (Hình 4.7)

Bước 9. Kết nối hộp pin với bảng mạch điều khiển (Hình 4.8)

Bước 10. Kết nối động cơ M1 và M2 với bảng mạch điều khiển. Động cơ bên trái cắm vào cổng động cơ M1 và động cơ bên phải cắm vào cổng động cơ M2 (Hình 4.9)

Bước 11. Bật công tắc nguồn sang ON. Nhấn nút để chuyển sang trò chơi số 3 (đèn LED màu xanh dương) để quan sát xe chạy thẳng về phía trước
Nhiệm vụ 2. Kết nối cảm biến siêu âm, cảm biến dò đường.
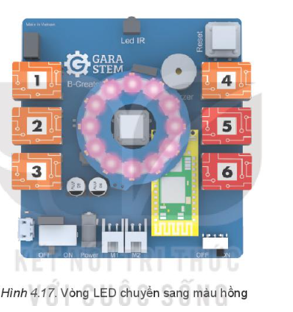
Yêu cầu: Cảm biến siêu âm và cảm biến dò đường được gắn đúng vị trí, kết nối đúng cổng và xe có thể tránh được vật cản.
Hướng dẫn:
Bước 1. Lắp ghép cảm biến dò đường vào bánh xe đa hướng (Hình 4.11)

Bước 2. Lắp trụ đồng vào bánh xe đa hướng và cảm biến dò đường (Hình 4.12)

Bước 3. Lắp trụ đồng có gắn cảm biến dò đường vào thân 9×15 của xe cơ bản. Cắm dây vào cảm biến dò đường và kết nối vào cổng số 1 trên bảng mạch điều khiển (Hình 4.13)

Bước 4. Gắn bộ chuyển đổi cảm biến siêu âm vào cảm biến siêu âm (Hình 4.14)

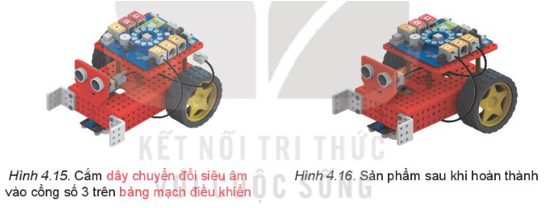
Bước 5. Cắm dây chuyển đổi siêu âm vào cổng số 3 trên bảng mạch điều khiển.
Nhiệm vụ 3. Chạy thử chương trình mẫu để kiểm tra cảm biến đã lắp ghép.
Hướng dẫn:
Chương trình mẫu 1 (kích hoạt còi và hiệu ứng đèn LED)
Bước 1. Nhấn nút chuyển chế độ ở giữa bảng mạch điều khiển và đồng thời nhấn nút khởi động lại ở góc bên phải của bảng mạch điều khiển.
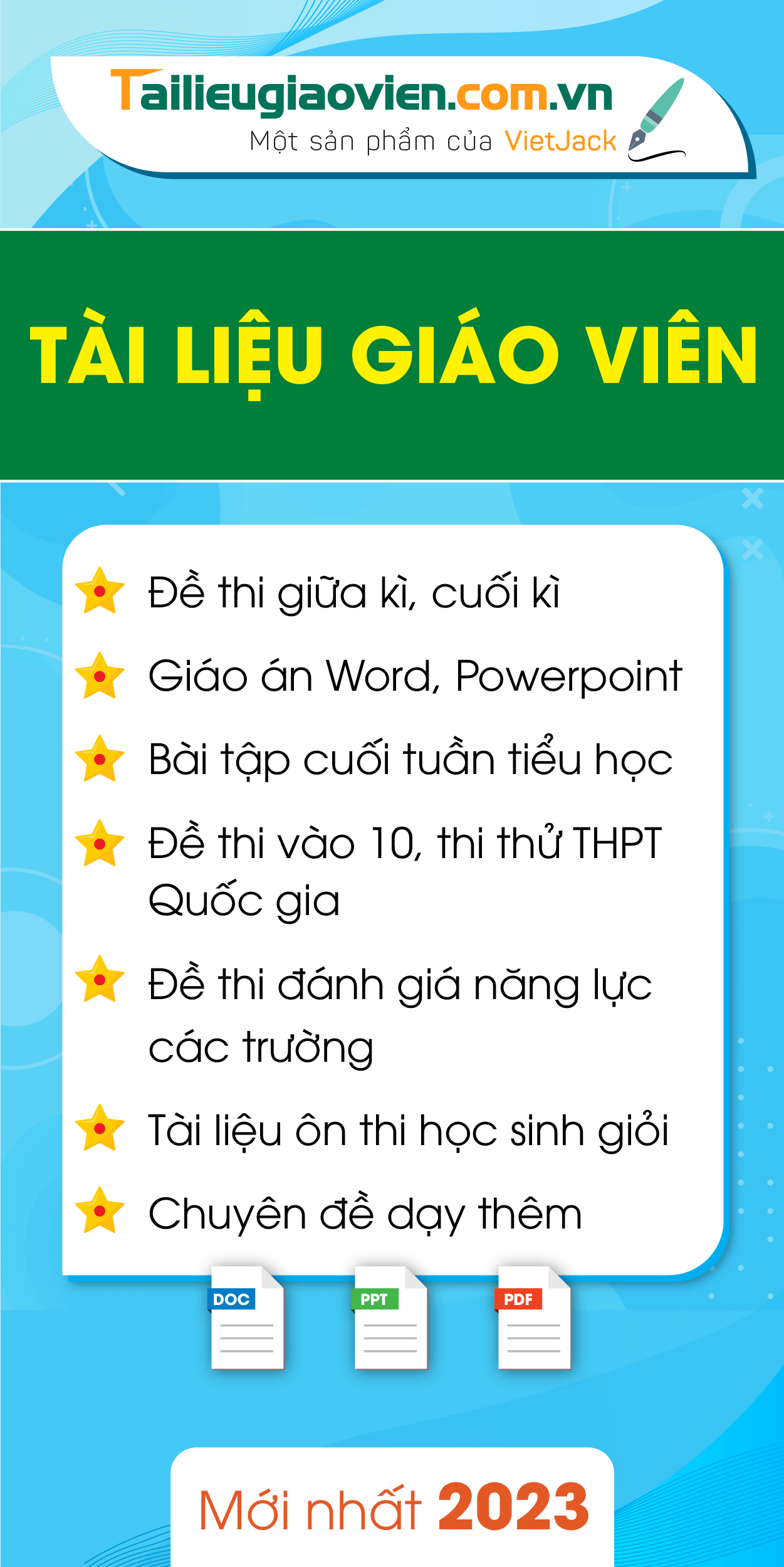
Bước 2. Khi nhấn nút khởi động lại, vẫn tiếp tục giữ nút chuyển chế độ trong 5 giây cho đến khi tất cả các đèn LED của vòng LED đều chuyển sang màu hồng rồi tắt hết chỉ còn lại một đèn LED sáng màu hồng.
Quan sát kết quả: Còi trên bảng mạch điều khiển phát ra âm thanh theo nhịp điệu của còi báo động. Các đèn LED lần lượt sáng, tắt theo hiệu ứng xoay vòng.
Chương trình 2 (Robot tự động di chuyển tránh vật cản):
Bước 1. Nhấn giữ nút chuyển chế độ ở giữa bảng mạch điều khiển và đồng thời nhấn nút khởi động lại ở góc trên bên phải của bảng mạch điều khiển.
Bước 2. Sau khi nhấn nút khởi động lại, vẫn tiếp tục giữ nút chuyển chế độ trong 5s cho đến khi tất cả các đền LED của vòng LED đều chuyển sang màu hồng rồi tắt hết chỉ còn lại một đèn LED sáng màu hồng.
Quan sát kết quả: Robot tự động di chuyển và tránh được vật cản nhờ cảm biến siêu âm.
Trả lời:
Xe không hoạt động được. Vì động cơ là cơ cấu chấp hành giúp xe có thể di chuyển bằng cách kết hợp và làm quay bánh xe thông qua trục động cơ. Pin là nguồn năng lượng cần phải cung cấp cho bảng mạch điều khiển để điều khiển xe hoạt động.
Trả lời:
Các cổng gắn động cơ nằm bên phải của cổng kết nối nguồn pin. Động cơ trái gắn với cổng M1, động cơ phải gắn vào cổng M2.
Trả lời:
Sử dụng phụ kiện bổ trợ lắp ráp khác (các tấm nhựa có trong bộ dụng cụ G-robot) để thay đổi vị trí gắn cảm biến dò đường. Cách hiệu chỉnh biến trở của cảm biến dò đường như sau: Đặt hai mắt của cảm biến dò đường (đã gắn bánh xe đa hướng và trụ đồng) vào vùng màu đen (bánh xe đa hướng chạm với mặt phẳng của vùng màu đen). Sau đó tiến hành vặn biến trở cho đến khi cả hai đèn tín hiệu vừa tắt hết thì dừng lại.
Lưu ý:
- Vặn biến trở theo chiều kim đồng hồ để giảm sự tương phản sáng tối (tăng độ nhạy) cảu hai mắt tín hiệu.
- Vặn biến trở ngược chiều kim đồng hồ để tăng sự tương phản sáng tối (giảm độ nhạy) của hai mắt tín hiệu.
Xem thêm các bài giải bài tập Chuyên đề Tin học 10 Kết nối tri thức hay, chi tiết khác:
Bài 3: Cảm biến và phụ kiện dùng trong robot
Bài 5: Phần mềm lập trình điều khiển robot
Bài 6: Chương trình điều khiển robot
Bài 7: Thực hành: Cài đặt và kết nối robot
CÔNG TY TNHH ĐẦU TƯ VÀ DỊCH VỤ GIÁO DỤC VIETJACK
- Người đại diện: Nguyễn Thanh Tuyền
- Số giấy chứng nhận đăng ký kinh doanh: 0108307822, ngày cấp: 04/06/2018, nơi cấp: Sở Kế hoạch và Đầu tư thành phố Hà Nội.
© 2021 Vietjack. All Rights Reserved.
![]()
")
")
: Bộ xử lí thông tin ở quanh ta")
")