Với giải Vận dụng 2 trang 60 Chuyên đề Tin học 10 Cánh diều chi tiết trong Bài 3: Thực hành lập trình điều khiển robot giáo dục dễ dàng xem và so sánh lời giải từ đó biết cách làm bài tập Chuyên đề Tin 10. Mời các bạn đón xem:
Giải bài tập Chuyên đề Tin học 10 Bài 3: Thực hành lập trình điều khiển robot giáo dục
Vận dụng 2 trang 60 Chuyên đề Tin học 10: Sử dụng cảm biến hồng ngoại, em hãy lập trình để robot di chuyển theo vạch đen trên nền nhà màu sáng.
Trả lời:
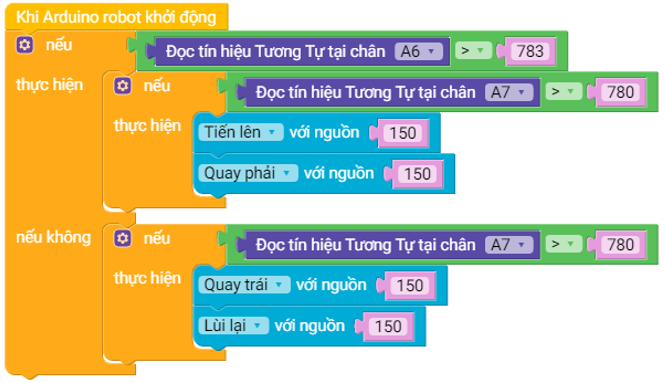
Đầu tiên ta cần lấy thông số để nhận biết khi nào các mắt bên trong và bên ngoài đường đen. Chúng ta sẽ chỉ cần dùng hai mắt ở giữa là A6 và A7 với các đường đơn giản.
Chương trình mẫu:

Sau đó chúng ta đo thông số khi các mắt nằm trong và ngoài đường đen rồi tính trung bình cho từng mắt. Ví dụ với 2 mắt A6, A7 sau:
| Mắt | Trong đường đen | Ngoài đường đen | Giá trị trung bình |
| A6 | 870 | 656 | 763 |
| A7 | 903 | 701 | 802 |
Tiếp theo chúng ta tiến hành so sánh với giá trị trung bình vừa có được:
- Nếu mắt A6 > giá trị trung bình ⇒ Mắt A6 đang trong vạch đen và ngược lại.
- Nếu mắt A7 > giá trị trung bình ⇒ Mắt A7 đang trong vạch đen và ngược lại.
Chúng ta có hai mắt nên sẽ có 3 trường hợp xảy ra khi để robot trên vạch đen.
| A6 | A7 |
| Trong đường đen | Trong đường đen |
| Ngoài đường đen | Trong đường đen |
| Trong đường đen | Ngoài đường đen |
Xem thêm lời giải bài tập Chuyên đề Tin học 10 Cánh diều hay, chi tiết khác:
Bài 1 trang 57 Chuyên đề Tin học 10: Lập trình điều khiển tay gắp robot...
Bài 2 trang 58 Chuyên đề Tin học 10: Lập trình điều khiển robot tự động gắp đồ vật...
CÔNG TY TNHH ĐẦU TƯ VÀ DỊCH VỤ GIÁO DỤC VIETJACK
- Người đại diện: Nguyễn Thanh Tuyền
- Số giấy chứng nhận đăng ký kinh doanh: 0108307822, ngày cấp: 04/06/2018, nơi cấp: Sở Kế hoạch và Đầu tư thành phố Hà Nội.
© 2021 Vietjack. All Rights Reserved.
![]()
")
")
: Bộ xử lí thông tin ở quanh ta")
")