Với giải Bài 2 trang 58 Chuyên đề Tin học 10 Cánh diều chi tiết trong Bài 3: Thực hành lập trình điều khiển robot giáo dục dễ dàng xem và so sánh lời giải từ đó biết cách làm bài tập Chuyên đề Tin 10. Mời các bạn đón xem:
Giải bài tập Chuyên đề Tin học 10 Bài 3: Thực hành lập trình điều khiển robot giáo dục
Bài 2 trang 58 Chuyên đề Tin học 10: Lập trình điều khiển robot tự động gắp đồ vật
Yêu cầu: Lập trình điều khiển robot tự động gắp đồ vật (ví dụ minh họa cho tình huống khi khoảng cách từ cảm biến siêu âm của robot tới đồ vật là 8cm thì robot sẽ gắp)
Trả lời:
a. Chuẩn bị
- Robot Arduino
- Máy tính đã cài phần mềm EasyCode
b. Tiến hành
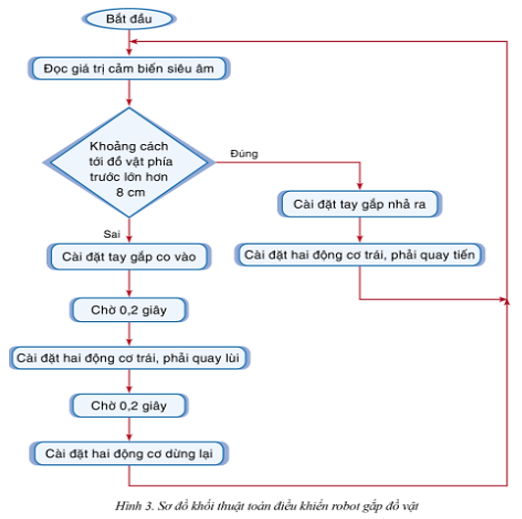
Bước 1. Lập sơ đồ thuật toán (Hình 3)
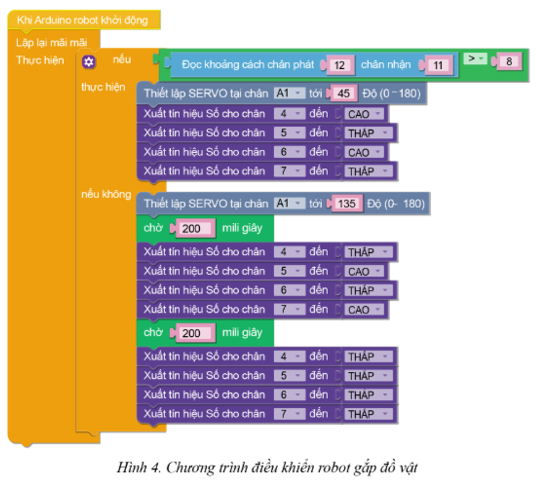
Bước 2. Lập chương trình (Hình 4)
Bước 3. Nạp chương trình
Bước 4. Quan sát hoạt động của robot
Quan sát hoạt động của robot và sửa lỗi chương trình cho đến khi robot hoạt động đúng yêu cầu.
Bước 5. Lập trình mở rộng
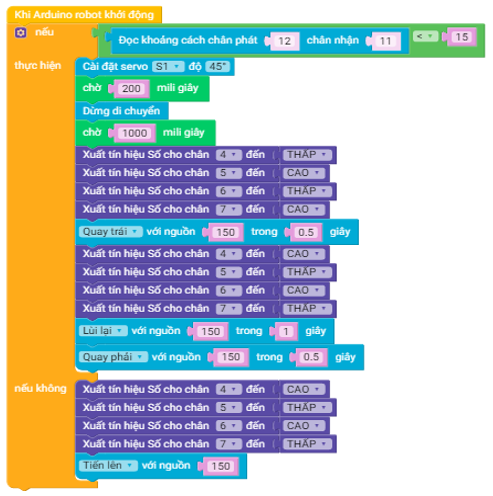
Em hãy viết lại chương trình để robot hoạt động như sau: Nếu không gặp thì robot di chuyển về phía trước và mở tay gắp. Nếu gặp đồ vật (khoảng cách 15cm) thì robot sẽ dừng lại 1 giây, gắp đồ vật, quay trái 0,5 giây, nhả vật, lùi lại 1 giây, sau đó quay phải 0,5 giây.
Chương trình có thể như sau:
c. Xử lý lỗi
Nếu tay gắp không thực hiện được thì thực hiện:
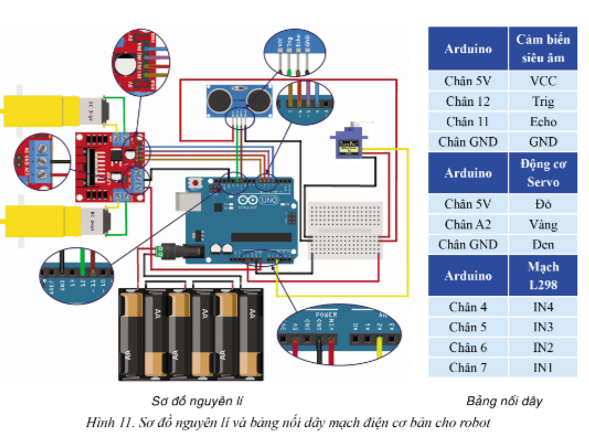
- Kiểm tra để đảm bảo việc lắp ráp mạch điện tử có đúng sơ đồ không và tín hiệu điều khiển tay gắp phải kết nối với chân A1 của Arduino.
- Kiểm tra và nạp chương trình.
Xem thêm lời giải bài tập Chuyên đề Tin học 10 Cánh diều hay, chi tiết khác:
Bài 1 trang 57 Chuyên đề Tin học 10: Lập trình điều khiển tay gắp robot...
CÔNG TY TNHH ĐẦU TƯ VÀ DỊCH VỤ GIÁO DỤC VIETJACK
- Người đại diện: Nguyễn Thanh Tuyền
- Số giấy chứng nhận đăng ký kinh doanh: 0108307822, ngày cấp: 04/06/2018, nơi cấp: Sở Kế hoạch và Đầu tư thành phố Hà Nội.
© 2021 Vietjack. All Rights Reserved.
![]()
")
")
: Bộ xử lí thông tin ở quanh ta")
")