Với giải Vận dụng 1 trang 15 Chuyên đề Tin học 10 Cánh diều chi tiết trong Bài 2: Robot giáo dục dễ dàng xem và so sánh lời giải từ đó biết cách làm bài tập Chuyên đề Tin 10. Mời các bạn đón xem:
Giải bài tập Chuyên đề Tin học 10 Bài 2: Robot giáo dục
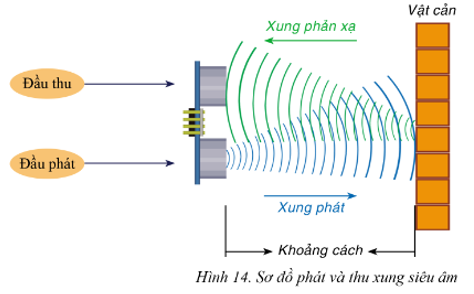
Vận dụng 1 trang 15 Chuyên đề Tin học 10: Cảm biến siêu âm đo khoảng cách bằng cách ghi nhận khoảng thời gian t (giây) từ lúc phát xung siêu âm đến lúc thu được xung phản xạ (Hình 14). Em hãy nêu công thức tính khoảng cách từ robot đến vật cản theo t. Biết rằng, xung siêu âm, xung phản xạ là sóng âm có tốc độ trong khoảng không khí là 340m/s. Coi khoảng cách từ robot đến vật cản xấp xỉ bằng quãng đường đi của xung phát hoặc xung phản xạ.
Trả lời:
Tốc độ của âm thanh trong không khí là 340 m/s (hằng số vật lý), tương đương với 29,412 microSeconds/cm (106 / (340*100)). Khi đã tính được thời gian, ta sẽ chia cho 29,412 để nhận được khoảng cách.
Xem thêm lời giải bài tập Chuyên đề Tin học 10 Cánh diều hay, chi tiết khác:
Khởi động trang 10 Chuyên đề Tin học 10: Em hãy nêu ứng dụng của robot trong giáo dục và đạo tạo....
CÔNG TY TNHH ĐẦU TƯ VÀ DỊCH VỤ GIÁO DỤC VIETJACK
- Người đại diện: Nguyễn Thanh Tuyền
- Số giấy chứng nhận đăng ký kinh doanh: 0108307822, ngày cấp: 04/06/2018, nơi cấp: Sở Kế hoạch và Đầu tư thành phố Hà Nội.
© 2021 Vietjack. All Rights Reserved.
![]()
")
")
: Bộ xử lí thông tin ở quanh ta")
")